




НЕЛИНЕЙНАЯ МЕХАНИКА
НЕЛИНЕЙНАЯ МЕХАНИКА
(МЕХАНИКА ГИБКИХ ЭЛЕМЕНТОВ)
Анализ напряженно-деформированного состояния, устойчивости и закритического поведения необходим для выбора рациональной технологической схемы разработки новых роботизированных систем, создания принципиально новых управляемых технологических роботов.


Технологии роботов
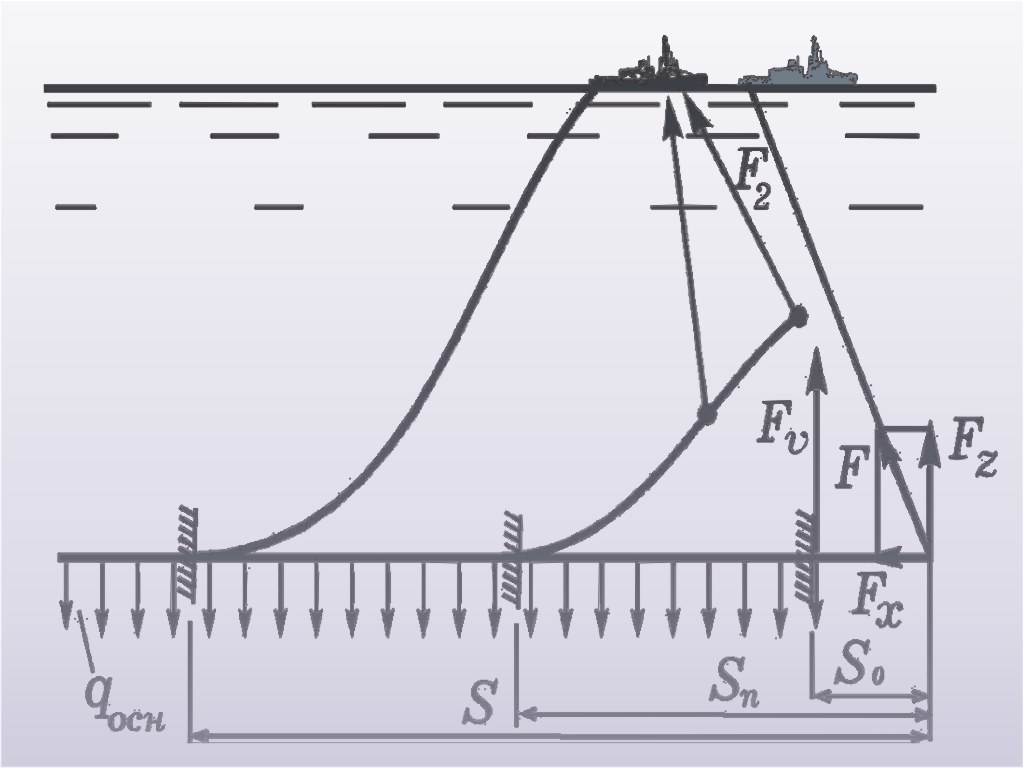
В роботизированных космических или подводных технологиях часто применяются в качестве исполнительных механизмов или элементов роботов гибкие элементы. В отличие от гибких элементов других конструкций в роботах они должны быть, как правило, управляемыми. Управление гибкими длинномерными элементами, помимо учета их напряженно-деформированного состояния, связано со многими технологическими операциями, позволяющими технически осуществлять этот процесс. Нами разработан метод управления гибкими пространственно искривленными объектами направленными силовыми воздействиями на дискретных участках продольной оси, которая благодаря этому может принимать любую требуемую пространственную форму. Методы решения поставленной задачи были успешно реализованы на космических и подводных роботизированных объектах: гибкие исполнительные механизмы, гибкие движители
В роботизированных космических или подводных технологиях часто применяются в качестве исполнительных механизмов или элементов роботов гибкие элементы. В отличие от гибких элементов других конструкций в роботах они должны быть, как правило, управляемыми. Управление гибкими длинномерными элементами, помимо учета их напряженно-деформированного состояния, связано со многими технологическими операциями, позволяющими технически осуществлять этот процесс. Нами разработан метод управления гибкими пространственно искривленными объектами направленными силовыми воздействиями на дискретных участках продольной оси, которая благодаря этому может принимать любую требуемую пространственную форму. Методы решения поставленной задачи были успешно реализованы на космических и подводных роботизированных объектах: гибкие исполнительные механизмы, гибкие движители
|
|